
This survey systematically reviews deep learning approaches for robotic manipulator motion planning and maps modern neural architectures to core planning primitives such as sampling, steering, collision checking, and trajectory optimization. We analyze current limitations-including data scarcity, generalization, safety, and real-time deployment-and outline a roadmap toward scalable and generalist neural motion planners. Check out the paper, project page, and paper list for more details.
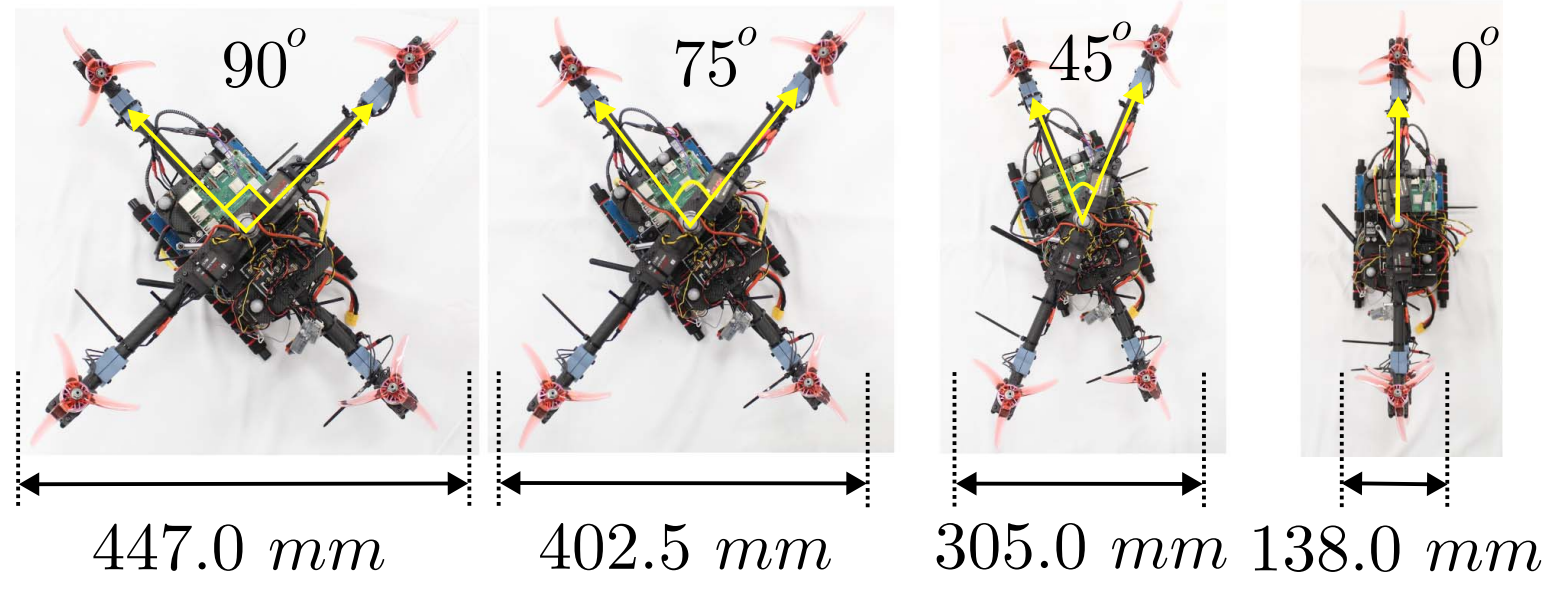
In this work, we present the design, control, and experimental validation of our novel morphing quadrotor, capable of reducing its width by up to 70% to navigate extremely narrow passages. The innovative mechanical architecture and control framework ensure stable and controllable flight across all morphed configurations. Check out the paper for more details.
In this work, we propose a two-stage distillation strategy that compresses a pretrained diffusion-based human motion prediction model into a lightweight MLP-based one-step diffusion model, enabling robots to reliably anticipate possible human motions in real time – even faster than the human motion data streaming frequency! Check out the paper for more details.
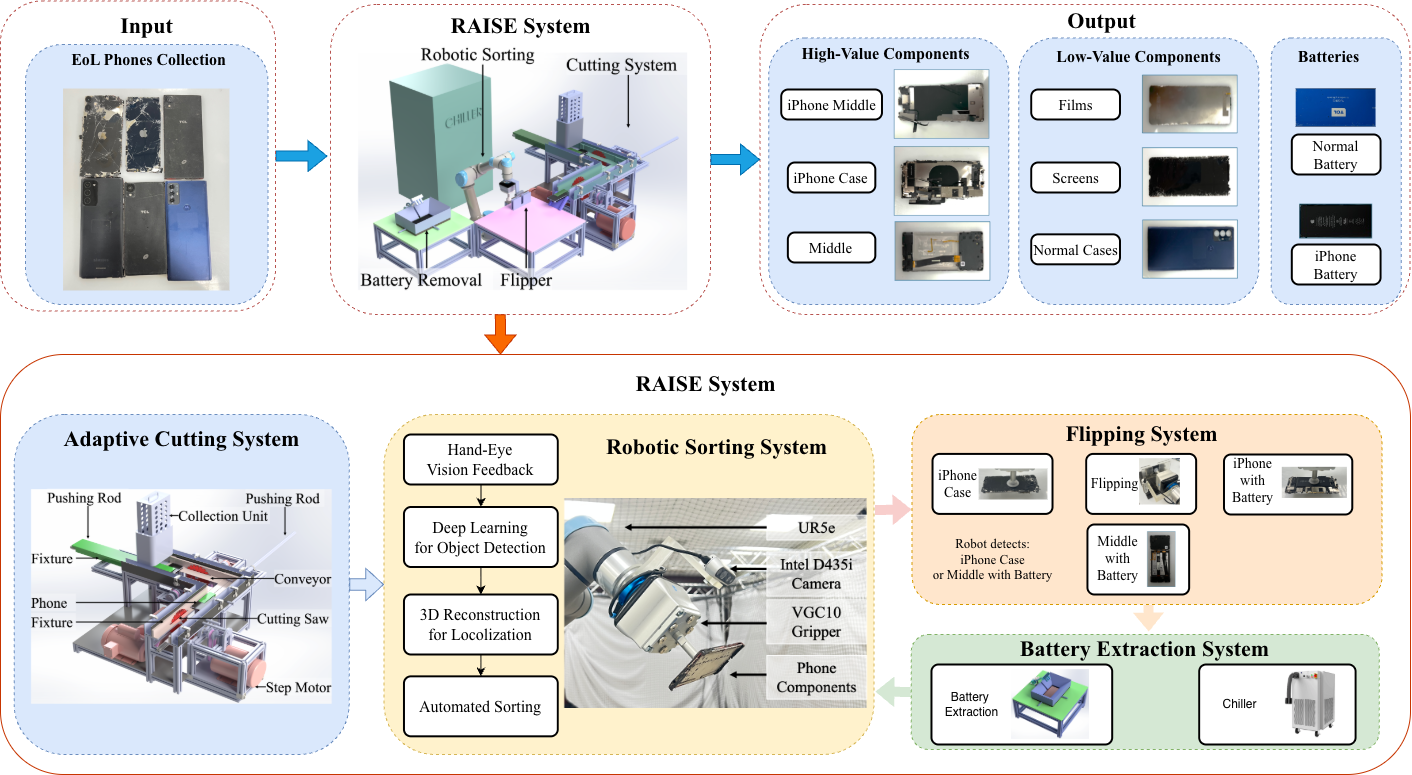
Our new paper titled “RAISE: A Robot-Assisted Selective Disassembly and Sorting System for End-of-Life Phones” has been published in Resources, Conservation, and Recycling.
Oct 29, 2025
In this work, we propose an automated system for the disassembly and sorting of end-of-life (EoL) phones, achieving high efficiency and accuracy. The system is designed to be cost-effective and highly scalable, transforming a previously unprofitable recycling process into a sustainable and profitable solution. Check the link for details.

MEEN Open House.
Sep 29, 2025
We are excited to participate in the recent MEEN Open House, welcoming faculty, families, alumni, and future students to explore our ongoing research. Visitors experienced demonstrations of our foldable drones and robotic systems for human-robot collaborative disassembly. Guests also had the opportunity to operate the robotic arm directly and complete object-grasping exercises by themselves. The lively demonstration highlighted how humans and robots can interact and work together.

Our Lab Attended and Presented Three Papers at ICRA 2025.
Jun 5, 2025
We are excited to share that our research group participated in the IEEE International Conference on Robotics and Automation (ICRA) 2025, held in Atlanta, Georgia. During the event, our team presented three papers showcasing our recent advancements in robotic motion planning and manipulation.
Interested applicants are encouraged to fill in the application form. Qualified candidates will be contacted for an interview by Prof. Minghui Zheng.
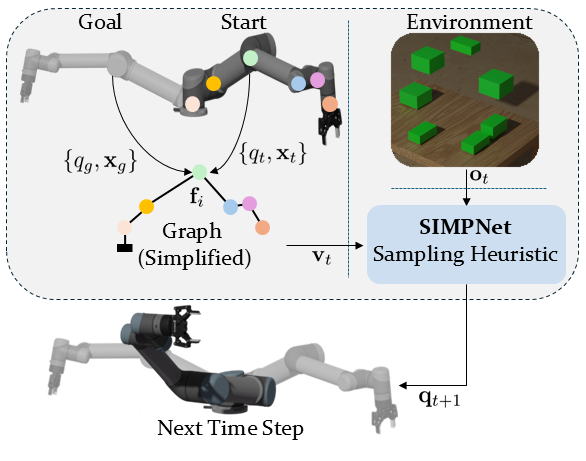
Supplementary materials are available via this link.. Check SIMPNet’s GitHub Repository and Project Website for more information.
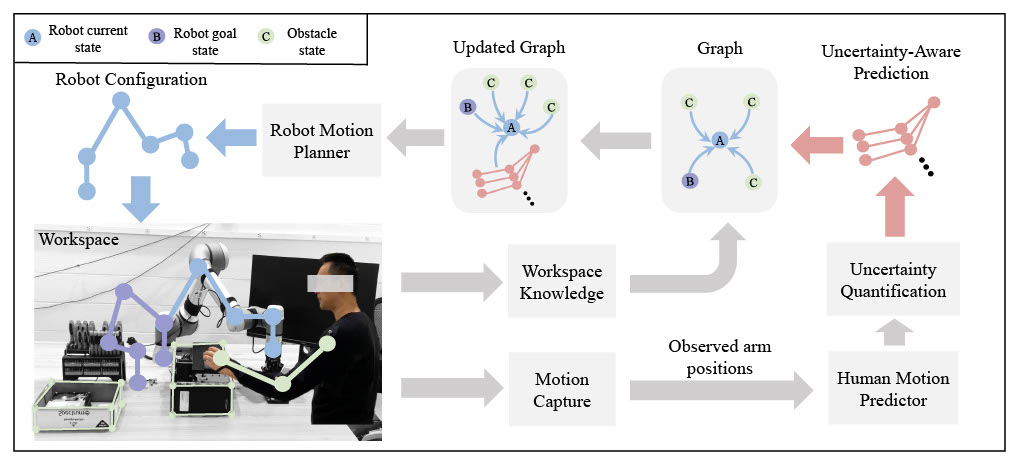
In this paper, we propose a human-aware motion planning framework for HRC to effectively compute collision-free motions for manipulators when conducting collaborative tasks with humans. Check the paper for details: IEEE Xplore.
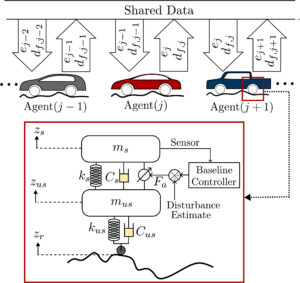
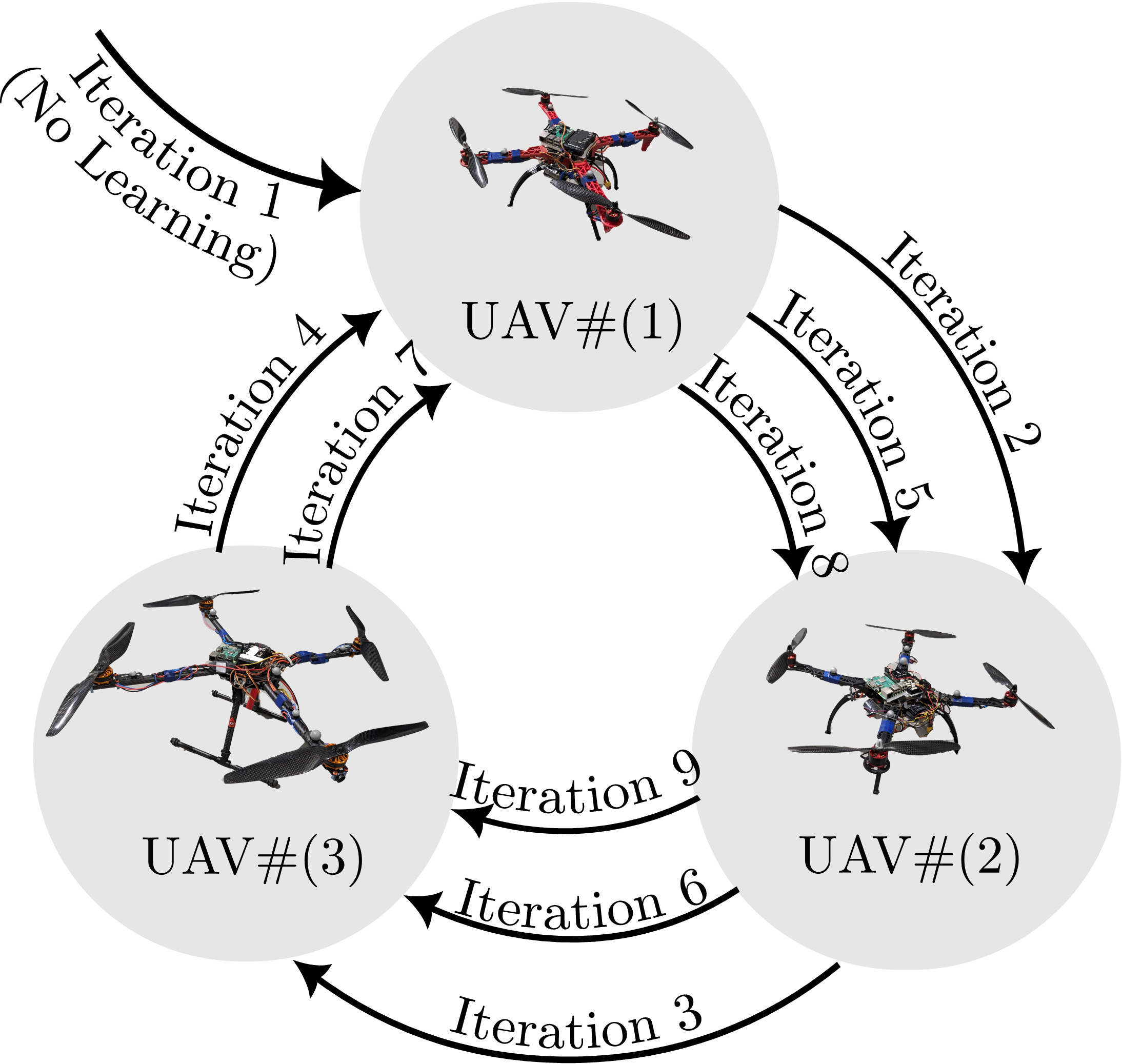
Our paper, titled “Robust Iterative Learning for Collaborative Road Profile Estimation and Active Suspension Control in Connected Vehicles,” was presented at the 2024 Modeling, Estimation and Control Conference. This research introduces a novel framework for collaborative road profile estimation utilizing iterative learning control and disturbance observation techniques. For more details, please visit our publication at arXiv.
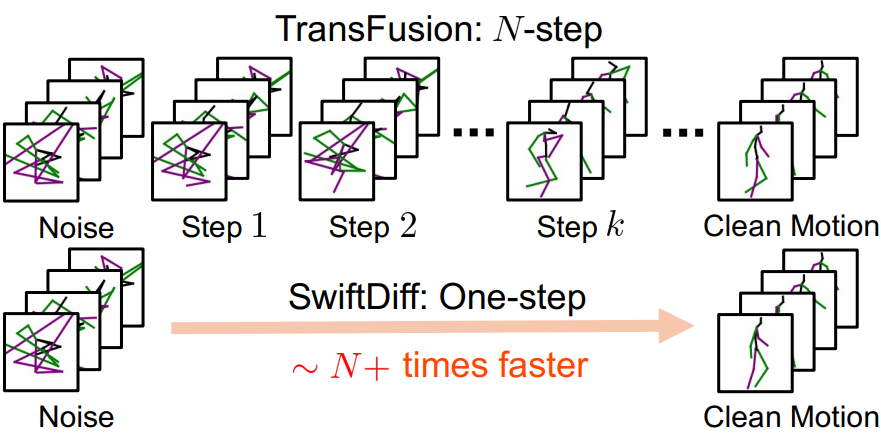
We drastically improved the inference speed compared to the SOTA diffusion-based motion predictor, and we are the first to achieve real-time 3D human motion prediction without noticeable degradation in performance. Check the project page for more details. Project Page link. Check Project Page for more information.

We Welcome New Members to Our Research Team: Bihao, Jiurun, and Yichang.
Sep 20, 2024
Supplementary materials are available via this link.
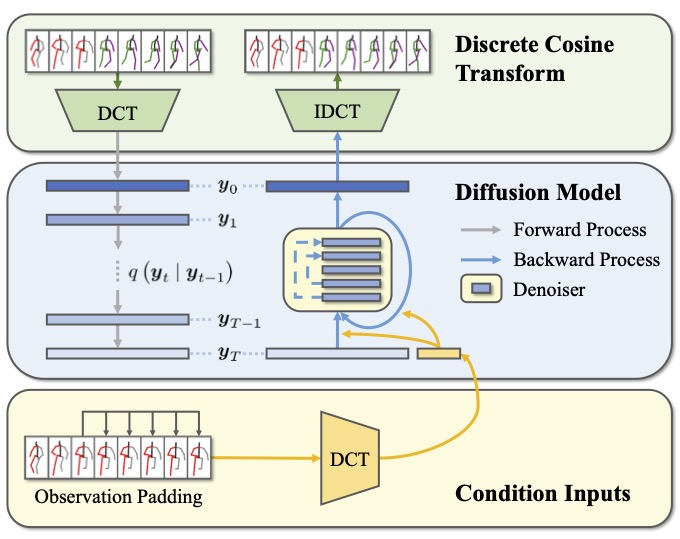
Demo and code for our IEEE RA-L paper “TransFusion: A Practical and Effective Transformer-based Diffusion Model for 3D Human Motion Prediction” are now released on the project page. Check Project Page for more information.

In an interview posted by the College of Engineering, Dr. Zheng discusses her academic background and research. In this interview, Dr. Zheng shares insights on her journey into mechanical engineering, discusses her motivations for joining the department, and explains the aims of her research. Read the full interview.
Dr. Minghui Zheng joins Texas A&M University!
Jan. 23, 2024
Dr. Zheng is joining the J. Mike Walker ’66 Department of Mechanical Engineering at Texas A&M University this Spring.
Dr. Minghui Zheng’s primary area is control and robotics. One of her research directions is task sequence and robotic motion planning in a human-robot collaborative environment. She is particularly interested in such developments to improve the efficiency and effectiveness of the disassembly, recycling, and remanufacturing of end-of-use products such as e-wastes. Read the full article.